Inspexel
The swiss army knife for dynamixel servo motors.
This software’s purpose is to have a command line tool to configure dynamixel motors. Dynamixel motors are being used in many robotic projects but it seems like some tooling around the motors is missing. There exists the robotis tool RoboManager which only runs under Windows. There are also other projects like Mixcell which bring some of the functionality to Linux. One big issue with these tools is that they have a GUI which makes it hard to use them over ssh on remote computers. Also it is not possible to use them inside of scripts. Inspexel is a command-line only utility to fill this gap. It also enables the generation of scripted (via bash) motions.
Features
- Automatic motor discovery
- All baudrates (even nonstandard baudrates)
- Dynamixel Protocol V1 and V2
- Support for all currently produced dynamixel motors
- Reading registers with additional information and pretty output
- Reading/Writing individual registers or register groups
- Represent motors and their registers as a fuse mounted filesystem for easy scriptability
- Reboot motors
supported motors
| Family | Subtypes |
|---|---|
| MX28 | MX-28T, MX-28R, MX-28AT, MX-28AR |
| MX64 | MX-64T, MX-64R, MX-64AT, MX-64AR |
| MX106 | MX-106T, MX-106R |
| MX12 | MX-12W |
| MX28-V2 | MX-28T-V2, MX-28R-V2, MX-28AT-V2, MX-28AR-V2 |
| MX64-V2 | MX-64T-V2, MX-64R-V2, MX-64AT-V2, MX-64AR-V2 |
| MX106-V2 | MX-106T-V2, MX-106R-V2 |
| XH430-W350 | XH430-W350-T, XH430-W350-R |
| XH430-W210 | XH430-W210-T, XH430-W210-R |
| XM430-W350 | XM430-W350-T, XM430-W350-R |
| XM430-W210 | XM430-W210-T, XM430-W210-R |
| XH430-V350 | XH430-V350 |
| XH430-V210 | XH430-V210 |
| XL430-W250 | XL430-W250 |
| XM540-W150 | XM540-W150-T, XM540-W150-R |
| XM540-W270 | XM540-W270-T, XM540-W270-R |
| M42-10-S260-R | M42-10-S260-R |
| M54-40-S250-R | M54-40-S250-R |
| M54-60-S250-R | M54-60-S250-R |
| H42-20-S300-R | H42-20-S300-R |
| H54-100-S500-R | H54-100-S500-R |
| H54-200-S500-R | H54-200-S500-R |
| XL-320 | XL-320 |
| AX-12A | AX-12A |
| AX-18A | AX-18A |
| AX-12W | AX-12W |
Usage
Inspexel comes with several subcommands. Each subommand represents a different aspect or way to configure a dynamixel motor or inquire its configuration. All commands accept the arguments
--device [path-to-serial-device]select the serial device--baudrate [baudrate-in-baud]select the baudrate to communicate to the motors (some commands also support multiple baudrates)--protocol_verion [1/2]use either protocol version 1 or 2
detect all connected motors
$ inspexel
or:
$ inspexel detect
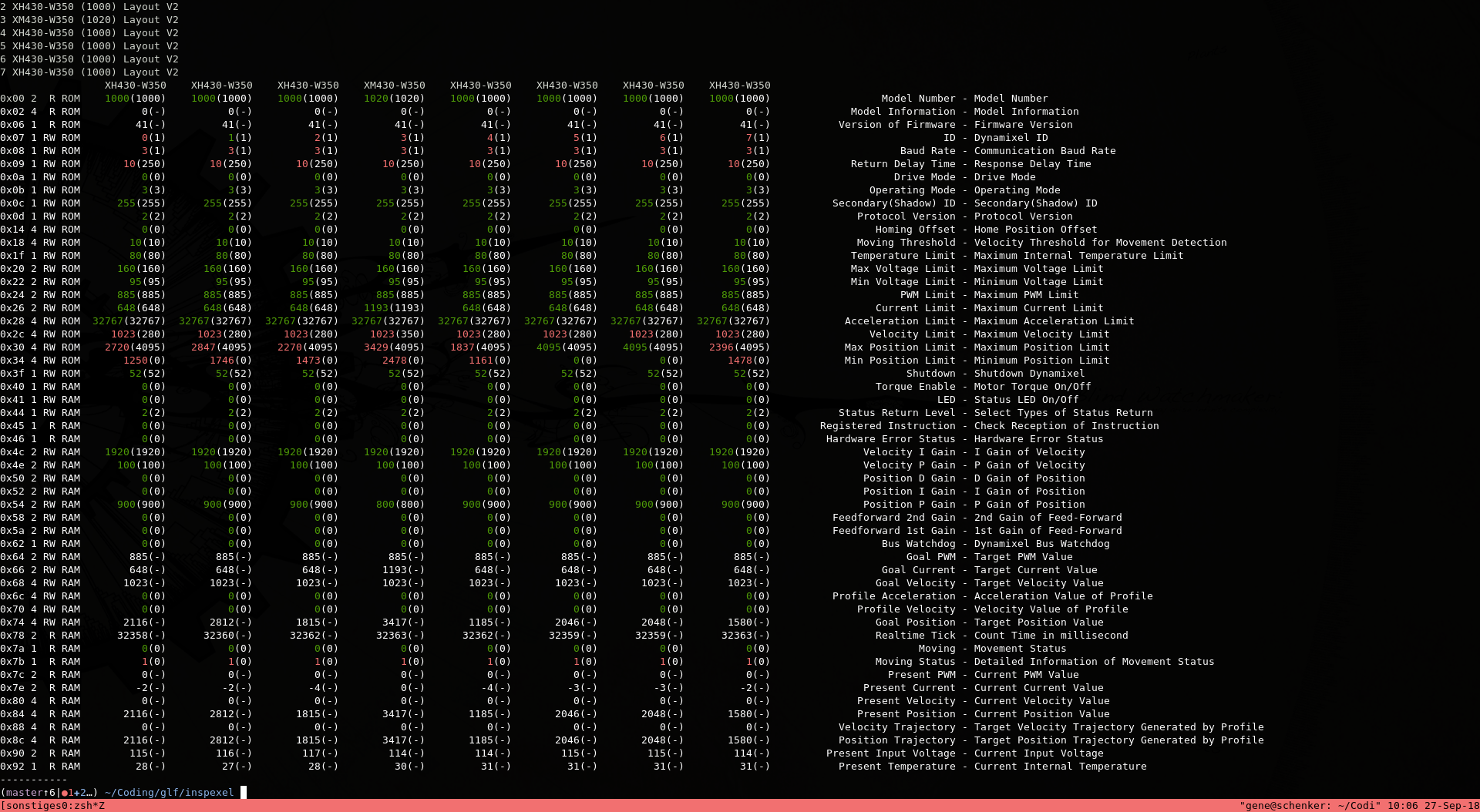
Add the flag --read_all flag to get the content of all registers nicely printed.
$ inspexel detect --read_all
Reboot a motor
Reboots motor with id 3
$ inspexel reboot --id 3
Manual setting of register(s)
Set register 0x44 (68) of motor 3 to value 1
$ inspexel set_register --register 0x44 --values 1 --id 0x03
Fuse integration
Inspexel can expose all registers of all connected as a fuse filesystem.
$ inspexel fuse
Inspexel will create a directory dynamixelFS.
Then a detect cycle is run automatically and every detected motor will be represented in a subdirectory of dynamixelFS (e.g., dynamixelFS/11/ for motor with id 11).
Within that directory are two subdirectories containing files representing the registers either by name dynamixelFS/11/by-register-name or by address dynamixelFS/11/by-register-id.
A read on any of the containing files will make inspexel perform a read of the corresponding register and return the content as string.
You can use that to live monitor the value of a register:
$ inspexel fuse & && watch cat "dynamixelFS/11/by-register-name/Present\ Position"
Likewise you can set register values as if they were files:
$ inspexel fuse & && echo 1 > dynamixelFS/11/by-register-name/LED
Further you can manually trigger detection of a motor by writing the motorID to look for to dynamixelFS/detect_motor:
$ echo 11 > dynamixelFS/detect_motor
Miscellaneous
getting help:
$ inspexel --help
Manpage:
$ man inspexel
How to install
Ubuntu 16.04
# install gcc-8
$ sudo add-apt-repository ppa:ubuntu-toolchain-r/test -y
$ sudo apt-get update
$ sudo apt-get install g++-8 gcc-8
# build inspexel
$ git clone https://github.com/gottliebtfreitag/inspexel.git
$ cd inspexel
$ make && sudo make install
Archlinux
# build inspexel
$ git clone https://github.com/gottliebtfreitag/inspexel.git
$ cd inspexel
$ make && sudo make install